5.5 電源電路
LPC17xx系列微控制器在電源部分需要五種電壓源對其供電,分別為:
1. 內核和外部通路所需的3.3V電壓源VDD(3V3);
2. 內部穩壓器所需的3.3V電壓源VDD(REG)(3V3);
3. 模擬部分(諸如片上ADC以及DAC)所需的3.3V電壓源VDDA;
4. 模數轉換器ADC所需的參考電壓源VREFP;
5. 實時時鐘RTC所需的3.3V電壓源VBAT。
由上述分析可見,如果用戶對ADC參考電壓源無特殊要求,LPC17xx系列微控制器可以統一由3.3V電平的電壓源供電,降低了用戶在設計硬件時電源部分的復雜度,需要注意的是,模擬部分電壓源VDDA可以與VDD(3V3)由相同的電壓源提供,但最好隔離開來以減小電源噪聲。除此之外,用戶的設計中不使用ADC或者DAC,關于模擬部分電壓源的管腳仍需要連接到電壓源上。
現以Linpo-PS-LPC1760開發板為例,簡單介紹一下LPC17xx系列微控制器電源部分的實現。如圖5.4所示,開發板使用常用的1117系列LDO低壓差線性穩壓器將外部5V電壓源降壓產生LPC17xx所需的3.3V的電壓,EC301和C302用于對5V輸入電源的濾波,EC302和C303用于對3.3V輸出電流的濾波。
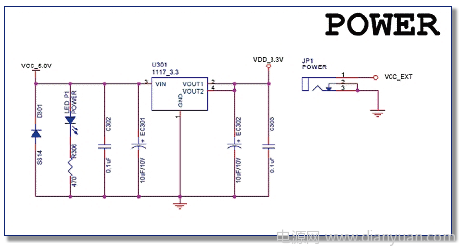
圖5.4 LPC17xx系列微控制器3.3V電壓源原理圖
LPC17xx的RTC部分電路可參看圖5.5,通過兩個二極管D101和D102實現板上3.3V電源或者是3.3V電池對RTC供電,且電池電源不會與板上3.3V電源產生影響。
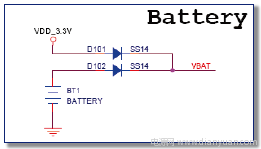
圖5.5 LPC17xx系列微控制器RTC供電部分原理圖
5.6 復位電路
LPC17xx系列微控制器擁有4個復位源,分別是外部RESET復位,看門狗復位,上電復位(POR)以及掉電檢測復位(BOD),LPC17xx系列微處理器的復位邏輯圖如圖5.6所示。
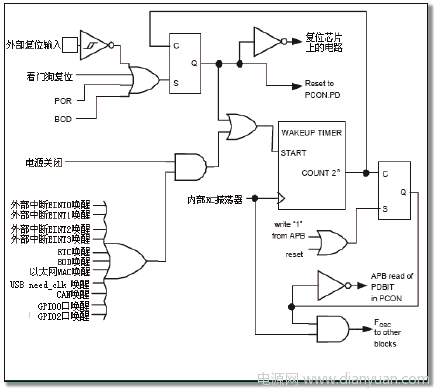
圖5.6 LPC17xx系列微控制器復位邏輯圖
一旦LPC17xx的Cortex-M3內核偵測到外部復位信號源(POR,BOD復位,外部復位和看門狗復位)出現,內部RC振蕩器(IRC)啟動。在內部RC振蕩建立時間(IRC-start-time,上電后最多60uS)并且IRC可以提供穩定的時鐘輸出后,復位信號將被鎖存并且與IRC時鐘同步。以下的兩步將會并發:
* 當同步復位信號斷定后,2位IRC喚醒定時器開始計數,在2位IRC喚醒定時超時后LPC17xx內部ROM的啟動代碼開始執行,啟動代碼完成啟動所需的任務以及實現跳轉到Flash的功能,如果Flash沒有準備好被訪問,MAM將插入等待周期直到Flash準備好了。
* 當同步復位信號斷定后,Flash喚醒定時器(9位)開始計數。Flash喚醒定時器將對Flash的啟動時間產生100uS的定時,一旦超時則Flash初始化順序將會啟動,這個初始化任務將會持續大約250個時鐘周期。當初始化順序完成,MAM就可以準許訪問MAM了。
當內部復位信號撤銷后,處理器將在地址0開始執行程序。因此,所有的與處理器和外設相關的寄存器將以預定值被初始化。圖5.7描述了當LPC17xx復位后啟動時RESET,內部IRC以及處理器狀態的關系。
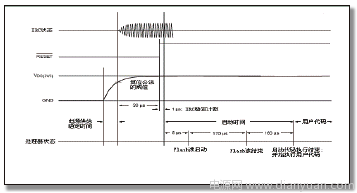
圖5.7 復位后系統系統示意圖
1.外部RESET復位
外部RESET復位是通過外部電路將LPC17xx的RESET管腳拉低實現復位。外部RESET復位信號不能立即清除,需在振蕩電路穩定工作后及LPC17xx系列微處理器的X1管腳上出現符合要求的時鐘信號方可清除復位信號。
在用戶實際應用中,用戶須按照芯片廠商提供的復位參數正確選擇復位器件以及合理的復位電路。LPC17xx系列微控制器的RESET管腳為施密特觸發輸入管腳,常見的外部復位電路有兩種,一種為阻容復位電路,另一種為專用復位IC電路。
阻容復位電路是利用上電時電容兩端的電壓不能突變因此Vc為0V。隨著對電容的不斷充電,Vc逐漸上升直至穩定的電源電壓,于是在芯片RESET管腳上形成了一定的低電平脈沖。當電源電壓消失時,二極管D1為電容C1提供了一個快速放電回路,從而使RESET管腳端的電壓迅速回零,以便下次上電時系統能及時可靠的復位。
雖然阻容復位電路簡單而且成本低廉,但并不能完全保證在任何情況下都能夠產生可靠穩定的復位信號,在實際應用中,應當選用可靠穩定的專用復位芯片。圖5.8為阻容復位的電路原理圖。
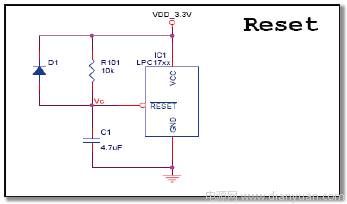
圖5.8 阻容復位電路原理
專用復位芯片也可理解為電壓監控芯片,其選型時主要注意硬件系統是否需要手動復位以及復位電壓閾值的選擇。隨著半導體廠商技術的創新,有些廠商將專用復位IC和E2PROM、看門狗或者RTC等結合到一顆芯片上,提供更為簡便的電路設計以及減小PCB的面積。Linpo-PS-LPC176X開發板選取的是圣邦微電子設計的帶有手動復位的復位閾值為2.95V的SGM811,如果用戶的設計并不需要手動復位功能,也可選取SGM809。復位閾值的選擇是根據LPC17xx微控制器的工作電壓范圍來選定的,LPC17xx的工作電壓范圍為2.4~3.6V之間,推薦工作電壓為3.3V,處于對電路工作更加穩定的考慮選取2.95V作為復位閾值比較合理,用戶也可以根據自己的實際需求定制復位閾值,根據復位閾值選取合適自己的復位IC。圖5.9為SGM811專用復位IC的電路原理圖。實際應用中需要對LPC17xx的復位RESET腳加上10K的上拉電阻,以保證復位的可靠性。

圖5.9 SGM811專用復位IC電路原理圖
2.看門狗復位
看門狗實際為一個獨立的計數器電路,對內部的獨立時鐘進行計數。計數器的一處輸出連接到系統電路的復位端,程序在一定時間范圍內對計數器清零或者重新裝載("喂狗"),以使程序正常工作即計數器不溢出,也就無法產生復位信號,如果程序執行時出現問題無法再規定的時間內復位看門狗計數器,則看門狗計數器就會溢出產生復位信號。
LPC17xx系列微控制器內部集成了看門狗的功能,對于要求不苛刻的應用,可以使用LPC17xx內部看門狗完成監控系統運行的任務。這樣可以減少硬件成本并減少電路板的面積和走線。看門狗初始化代碼如程序清單5.1所示。
程序清單5.1 LPC17xx 看門狗初始化代碼
WDCLKSEL = 0x00; //bit1:0 WDSEL 00:選擇內部RC振蕩器為看門狗時鐘源
WDTC = 0x003FFFFF; //設置看門狗定時器參數
WDMOD = 0x03; //設置看門狗模式:中斷且復位
3.上電復位
LPC17x x系列微控制器具有上電復位功能,當VDD管腳電平超過門限值時,POR信號有效,Cortex-M3內核還是進入復位狀態。
4.掉電檢測
LPC17xx的VDD管腳帶有2級電壓檢測,如果VDD電壓低于2.95V,則掉電檢測器(BOD)向中斷向量控制器發出中斷信號,使能該信號可以通過使能NVIC中的中斷使能寄存器,即可產生CPU所需的中斷;如果沒有使能NVIC中的中斷使能寄存器,軟件也可以通過讀取Raw Interrupt Status Register中的內容實現監控。
當VDD管腳的電壓降到低于2.65V時,第2級的低壓檢測將產生復位信號。該復位可以防止Flash的內容發生改變,因為在低電壓下各個功能部件的操作都將變得不再可靠,LPC17xx的BOD電路可以在電源電壓為1V及其以上時保持復位信號。
2.95V和2.65V閾值都存在一些滯后。正常工作時,滯后使得2.95V的檢測電路能夠產生可靠的中斷信號,掉電檢測中斷信號能夠喚醒處于掉電模式下的CPU,使CPU退出掉電模式,但是,如果電源電壓在喚醒定時器完成延時前恢復為正常電平,那么此時BOD產生的結果是:CPU被喚醒,但不會產生任何中斷,RSID寄存器中的BODR位清零,此時可以確認掉電喚醒操作完成。
聲明:本內容為作者獨立觀點,不代表電源網。本網站原創內容,如需轉載,請注明出處;本網站轉載的內容(文章、圖片、視頻)等資料版權歸原作者所有。如我們采用了您不宜公開的文章或圖片,未能及時和您確認,避免給雙方造成不必要的經濟損失,請電郵聯系我們,以便迅速采取適當處理措施;歡迎投稿,郵箱∶editor@netbroad.com。
| 微信關注 | ||
 |
| 技術專題 | 更多>> | |
 |
| 技術專題之EMC |
 |
| 技術專題之PCB |



| 電子行業原創技術內容推薦 | |
 |

互聯網違法不良信息舉報
Reporting Internet Illegal and Bad Information editor@netbroad.com
editor@netbroad.com
 400-003-2006
400-003-2006