現(xiàn)在并網(wǎng)逆變器很火,我前一段時間專門學(xué)習(xí)了一下相關(guān)的知識。開貼與大家分享一下,也請大家提出問題,大家一起討論,共同進(jìn)步。采用分段寫的形式,有時間不斷更新。

現(xiàn)在并網(wǎng)逆變器很火,我前一段時間專門學(xué)習(xí)了一下相關(guān)的知識。開貼與大家分享一下,也請大家提出問題,大家一起討論,共同進(jìn)步。采用分段寫的形式,有時間不斷更新。
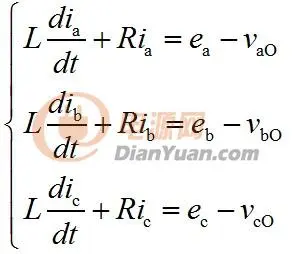
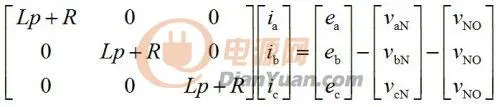
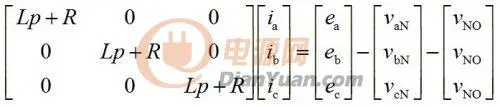
(A)、2樓式子可以看出V與i是相互影響的,確定了i就確定了v,確定了v就確定了i.
(B)、變流器工作在哪種狀態(tài)有i確定。
(C)、直接受我們控制的是6個開關(guān)管的通斷,當(dāng)6個開關(guān)管的通斷狀態(tài)確定時,V處的電壓也跟著確定。
從上面三點可以看出,要控制變流器的運(yùn)行,只要按照三步來做就可以。
(1) 確定變流器的電流
(2)通過電流確定三相橋臂的中點電壓
(3)由三相橋臂中點電壓求三相橋臂的驅(qū)動信號。
下面將這三步分開分析,不一定按照這個次序來,先分析簡單的。中途需要涉及到其他知識的,也提前先列出來。
坐等樓主更新,傳說中的SPWM或SVPWM,加空間解耦,前饋補(bǔ)償
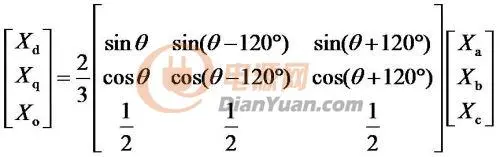
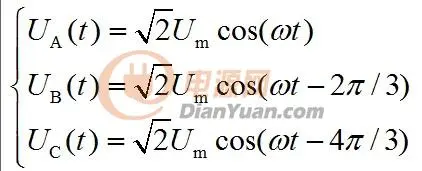
在三相系統(tǒng)中,常見的有三種坐標(biāo)系:三相靜止坐標(biāo)系(abc)、二相靜止坐標(biāo)系(alpha-beta)、二相旋轉(zhuǎn)坐標(biāo)系。
平常見的ABC分布在平面上,互差120°就是三相靜止坐標(biāo)系。因為這個是二維平面,用二個不用向的矢量就可以表述整個平面上的向量,因此用平面上二個垂直的坐標(biāo)系就可以表示三相坐標(biāo)系中的量,即為二相靜止坐標(biāo)系。在三相或二相靜止坐標(biāo)系中,各個量(電壓電流。。。)都是余弦函數(shù),是個變化的數(shù)值。這二種坐標(biāo)系的的特點是坐標(biāo)軸都是固定的,數(shù)值是變化的。計算起來也麻煩。
如果我們將坐標(biāo)軸按照電壓或電流的頻率來旋轉(zhuǎn),在軸上通一幅值為電壓或電流最大值的直流量時,就發(fā)現(xiàn)這個直流量在靜止坐標(biāo)系上的投影就是電壓或電流在靜止坐標(biāo)系下的值。就是說這二種方法要表達(dá)的結(jié)果是一樣的,只不過是表達(dá)的方式不一樣罷了。這種坐標(biāo)系(二相旋轉(zhuǎn)坐標(biāo)系)的特點是坐標(biāo)軸旋轉(zhuǎn),數(shù)值是直流量。
實際上在控制的時候正常都用二相旋轉(zhuǎn)坐標(biāo)系來控制。理由如下:
1、靜止坐標(biāo)系下得量是一個變化的數(shù)值,用PI調(diào)節(jié)(現(xiàn)在用的最多的方法)時要跟蹤的是一個變化量,這樣必然會有誤差!(靜態(tài)誤差或叫靜差,這從理論上就無法消除)
2、二相旋轉(zhuǎn)坐標(biāo)系的坐標(biāo)軸是二個垂直的量,選擇好參考角度,就可以用一個軸表示有功一個軸表示無功,這樣很容易控制變流器的功率因數(shù),而這個參數(shù)在并網(wǎng)時是有嚴(yán)格要求的。
mark
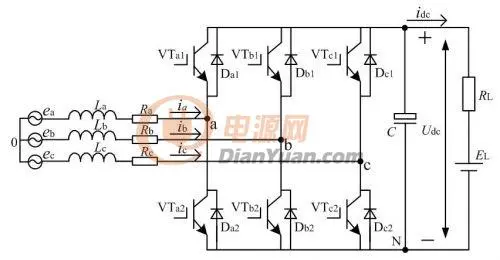
下面再回頭看看三相半橋。不考慮死區(qū)時各個橋臂的開關(guān)狀態(tài)總是互補(bǔ)的。不會同時通也不會同時斷(斷了相當(dāng)于這一橋臂沒起作用,死區(qū)時間很短,暫不考慮)。
我們把上橋臂導(dǎo)通下橋臂關(guān)斷定義為1,下橋臂導(dǎo)通上橋臂關(guān)斷定義為0.則三相橋臂一共有2的三次方=8種狀態(tài)。
在ABC=100時(表示A的開關(guān)狀態(tài)為上通下斷,BC的狀態(tài)都為下通上斷。下面的用法類同)。
A端電壓為UDC,BC端電壓都為0,此時的電路化簡為下圖的樣子
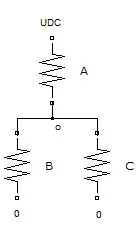
由于是三相對稱的,三個負(fù)載一樣。則很容易得到UAO=2UDC/3,UBO=UCO=-UDC/3,
將這種狀態(tài)下的電壓帶入矢量定義公式 中得到:
中得到:
U=2UDC/3,
同理可以得到其他狀態(tài)的值,列入下表中
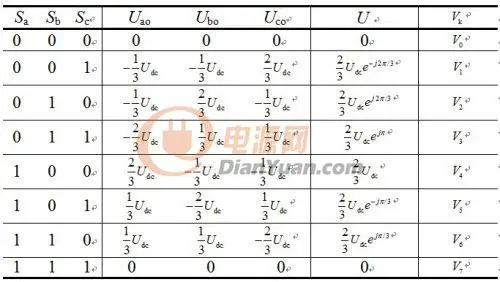
將各種狀態(tài)下的值畫在圖中如下:
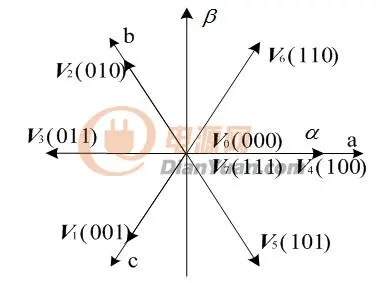
共8個矢量,6個非零矢量和2個零矢量。6個非零矢量將平面均分成6個區(qū)域。
有這幾個矢量的組合可以合成該平面上的想要的任何矢量。
既然確定有幾個基本矢量可以合成想要的矢量。那么接下來的工作就是確定用那幾個基本矢量(就是采用哪一組導(dǎo)通狀態(tài)),計算出每個矢量應(yīng)該作用的時間(就是確定每一組導(dǎo)通狀態(tài)所維持的時間)。
由于PWM信號的生成是通過定時器的實際值與比較值CMPR比較所得,因此最后要做的就是將每一組導(dǎo)通狀態(tài)的維持時間變成定時器中的比較值CMPR寫入寄存器中。
總結(jié)一下列出來就是:
SVPWM調(diào)制的一般步驟為:
(1) 判斷目標(biāo)合成矢量所在扇區(qū)
(2) 計算相鄰2個基本空間矢量的作用時間
(3) 根據(jù)基本矢量的作用時間求定時器中的比較值。


 源源幫頂
源源幫頂